





新たな
セキュリティ
の創造
ロボット×ALSOK

自律走行型警備ロボットの開発
【開発経緯】
ALSOKは1982年、常駐警備の効率化を目的に、自律走行型警備ロボットの研究開発に着手しました。
少子高齢化による労働力不足に対応するため、警備業界では警備品質を維持・向上させる新たな手段が求められています。警備員の負担軽減も重要な課題であり、犯罪の凶悪化や過酷な勤務環境に伴うリスクを低減する必要があります。
こうした背景を踏まえ、ALSOKでは安全性と効率性を両立する解決策として、警備ロボットの開発を進めています。
【ロボットである意義】
固定機器を設置して24時間監視を行う従来の機械警備では、発生場所や対応すべき地点が一定でない場合には十分に対応できません。また、固定機器を多数配置しようとすると、機器費が高額になるという課題もあります。
そこでALSOKでは、ロボットによる「移動の価値」を最大限に活かすため、さまざまな機能の研究・開発を進めています。
【ロボットフレンドリー化に向けた取り組み】
経済産業省の「令和6年度革新的ロボット研究開発等基盤構築事業」に採択され、他社と共同で「ロボットとセキュリティシステムの連携」に関する実証実験を実施しています。
従来はロボットが目的地に到着した際に人による操作が必要で、省人化が進まない課題がありました。これを解決するため、ロボットがエレベーターや扉、機械警備と連携するための規格・ガイドライン策定を推進しています。さらに、警備ロボットと機械警備の連携により清掃ロボットを支援し、建物の警備レベルを維持する仕組みも検討しています。
【機能】
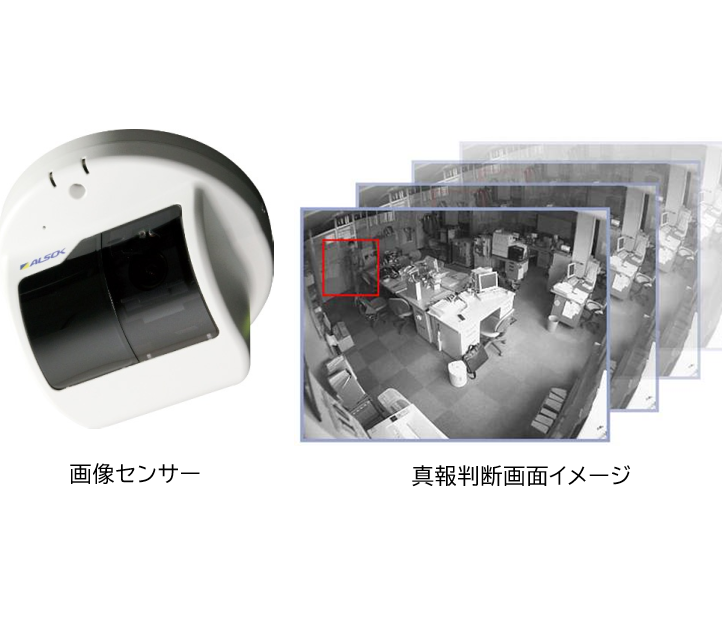
1. 不審物検知:画像解析により巡回ルート上の不審物を検知
2. 異常音検知:悲鳴など特定音を検知し、事故・事件を未然防止
3. ガス検知:可燃性・毒性ガスを検知し、注意喚起による安全確保と避難誘導
4. 火災検知:赤外線カメラや炎センサーで火災を検知し、避難誘導と内蔵消火器による初期消火
5. 施設案内:タッチパネルと音声案内、多言語対応でスムーズなナビゲート
6. 設備制御:エレベーターや自動ドア等建物設備と連携し、フロア移動や清掃ロボットとの連携が可能
【要素技術】
・通信、ネットワーク:ローカル通信、高速広域通信、ネットワーク連携
・センシング技術 :人感センサー、火災センサー、ガスセンサー
・音声・画像処理 :画像解析(不審物検知、顔認証)、音声解析(異常音検知)
・自律走行 :マップ作成、障害物回避、設備連携


採用情報
ALSOKは増収が続く今日、主力であるセキュリティ事業を強化するとともに、新規事業にも積極的に取組んでおります。
そこで、さらなる開発強化を図るために、開発業務におけるソフトウェア開発エンジニア、および、AI、画像・音声解析技術に関する研究エンジニアを募集しております。